

DL 事業部 水野 貴宏
1.はじめに
平成28年度の年間発着回数が24万回を超え、ひと月当たり2万機の航空機が離着陸する成田空港。羽田空港に次いで国内第2位の離着陸回数を誇る国際空港を抱える成田市様では、成田空港を離着陸する航空機の飛行高度及び飛行コースの常時監視をされる目的で、航空機の断面通過位置を測定できる弊社製システムを昭和62年度に導入いただき、平成12年度にはこれらの機器を飛行航跡を連続的に測定可能とする新システムに更新いただきました。この新しいA滑走路高度コース測定システムは導入後丸17年にわたってご利用いただいておりましたが、平成28年度末に機器更新を実施いただき、弊社では引き続きこのシステムの構築のお手伝いをさせていただきましたことから、本記事にて、音の到来方向から航空機の飛行経路を捉える高度コース測定システムの概要と、その有用性についてご紹介します。
2.航空機の飛行経路を把握する需要
航空機は通常、決められた航路、言わば空中に設定された道路の上を飛行しています。昨今国土交通省が検討を進めている首都圏空港機能強化において、羽田空港周辺の新たな飛行ルートが提案されたことが話題になっており、ご存知の方も多いのではないでしょうか。弊社でも、技術ニュースvol.41にてこの話題を取り扱い、各方面から多数の反響を頂戴しました。
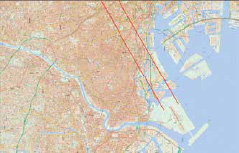
図1羽田空港の着陸飛行経路案
(弊社技術ニュースvol.41より引用)
航空機の航路周辺に位置し、常日頃から航空機が上空を通過する地域においては、省庁、地方自治体、空港会社等の皆様がそれらの地域においてどの程度航空機の騒音に暴露されているかを測定・監視しておられるかと思います。
しかし、地域住民から寄せられる声の中には、騒音被害についての相談に加えて航空機の飛行位置や飛行高度についての相談・意見があるがゆえ、騒音暴露状況は把握しているものの、航空機の飛行位置を確認できるデータをお持ちでないため、対応に苦慮されているケースをしばしばお見かけしています。
このような場合、飛行経路を事前に把握しておけば迅速で正確な対応が可能になることから、飛行経路の情報を入手したいというニーズが高まりを見せています。
また、ほとんど全ての航空機は決められた航路を飛行するものの、大雨・強風・落雷など気象条件が悪い場合や滑走路の一時閉鎖など、飛行中の航空機の安全を確保するために規定の航路以外を飛行する、経路逸脱のケースが見られないわけではありません。
図2飛行経路の逸脱(イメージ)
経路逸脱が発生すると、通常の航路から想定している地域以外へ航空機騒音の影響が発生してしまうため、問題となる事例が少なからずあるようです。
これらのような状況への具体的な対応策として、決められた航路を事前に確認し、航空機騒音の暴露状況を把握するだけではなく、航空機が実際に飛行した経路を把握し、監視しておくことが大変有用であると考えています。
3.航空機の飛行経路情報を取り巻く状況
実は航空機の飛行経路情報については、近年情報公開が進んでおり、ひと昔前に比べると大幅に入手しやすくなっています。
実際に羽田空港や成田空港、中部国際空港等ではインターネット上に飛行航跡を公開しており、誰でも閲覧できるようになっています。ただし、このように公開されている情報を基にして飛行経路を監視しようとした場合、航跡の確認自体はこの方法で実施できますが、実施できるのは閲覧のみとなり、測定データ自体を手に入れることはできないため、データを詳細に確認・分析することは困難です。
ご存知の方も多いと思いますが、他の方法では、FlightRadar24というアプリを使用する方法があります。このアプリは簡単にダウンロードできるものですが、航空機の現在位置、高度、機種や航空会社まで、手元のスマートフォンで確認できてしまいます。
ただし、FilightRadar24には課題があることも事実です。FilightRadar24では航空機が発信しているADS-Bという電波を受信・解析し、航空機位置等を割り出した結果を表示しているのですが、この電波は全ての航空機が発信しているわけではないため、捕捉することができない航空機が存在します。また、このデータについても、用途は閲覧に限られ、測定データそのものを入手することはできません。これらのことから、FlightRadar24を飛行経路監視用途で使用することは難しいのが現状です。
このような背景から、飛行経路情報の公開が進んでいるとは言いつつも、実際に飛行経路の監視を行おうとすると、いくつかのハードルがあるというのが現状です。ところが、今回ご紹介する高度コースシステムは航空機が発する音から航空機の飛行位置を捉えることができるシステムのため、これらの諸条件に制約を受けることなく、飛行経路情報を得ることができるため、大変有用と考えています。
4.成田市と成田空港について
成田市様では市内を飛行する航空機の飛行位置を市独自に測定してこられました。
成田空港は西側のA滑走路、東側のB滑走路の2本の滑走路を擁し、1日の平均離着陸回数が600回を超える国際空港です。成田市は成田空港の北側に広がっており、両滑走路を北向きに離陸する航空機と、南向きに着陸する航空機の飛行経路となっています。航空機が離着陸する際の経路については、九十九里から利根川までの間を直進上昇・直進下降することとされ、また、航空機騒音の拡散防止を徹底するため、飛行コースの監視区域が設けられているとともに、大規模内陸空港であるため、空港の運用時間は24時間であるものの、航空機の離着陸は原則午前6時から午後11時までに行うこととされています。
成田市様では市内を通過する航空機について、飛行経路の実態を把握するため、A滑走路、B滑走路それぞれに対し飛行高度及び飛行コースを測定するシステムを整備され、年間を通じて継続的に監視をされています。

図3成田市と成田空港のA滑走路・B滑走路
5.高度コース測定システム
飛行高度及び飛行コースを測定するためのシステムが、高度コース測定システムです。測定局は音響ベクトルセンサーと航空機接近識別装置・航空機最接近識別装置と気象計で構成されています。
音響ベクトルセンサーは航空機が発生する騒音を4つのマイクロホンで捉えるセンサーです。このセンサーで得られた測定結果を基に、音源の到来方向、つまりは航空機が飛行していた方向を算出することができます。
音航空機1機が通過した際の算出結果例を図4に示しました。円の中心がセンサーの位置を、赤い点が音源の方向を示しています。時間経過とともに赤い点が右下の方向から左上の方向へと移動していることがわかります。これは、音源が右下方向からセンサーの真上を通り、左上方向に飛行したことを示しています。
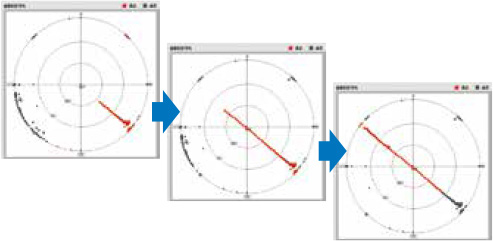
図4音源到来方向算出結果の例
音響ベクトルセンサーの4つのマイクロホンは、センサーの中心に1つ、これを囲むようにX,Y,Z軸方向に合計3つが配置されており、それぞれに風雑音を低減させるための全天候ウインドスクリーンを装着しています。

図5音響ベクトルセンサー
これら4つのマイクロホンを備えた音響ベクトルセンサーは80cm四方、高さ90cmと大変に大型ですが、周辺の建物を避けて見通しを良くするとともに、地上から聞こえる自動車騒音や人の声から遠ざけ、また、地面反射音の影響をできる限り小さくするため、センサー専用の、8mから14m高さのコンクリート柱の上に配置されることになります。

図6コンクリート柱(14m)と音響ベクトルセンサー
定期的なメンテナンスを実施するため、コンクリート柱にはレールと昇降機が取り付けてあり、センサーは昇降可能としてあるのですが、更新前のセンサーは、通年測定に耐えうる強固なものとするようほとんどの部品をアルミの削りだしで構成していたため非常に重く、二人がかりでの作業が必須でした。今回の更新では強度が高く軽いアルミ中空部材を使うなど、強度を維持しながら軽量化を図り、7.5㎏と更新前の半分以下、片手で持つことのできる重量に抑えることができました。
センサーの中心に位置するマイクロホンの下には、反射音の影響を低減させるための吸音体が配置されています。従来のセンサーではこの吸音体にグラスウールを使用していたのですが、屋外に長期間さらされるため、劣化が激しく、メンテナンスをする上で課題のひとつとなっていました。更新後の吸音体には吸音性能を維持しつつ劣化のしにくいペットボトル原料の新素材を採用し、耐久性を高めています。
また、従来のセンサーでは、音の到来方向を正確に算出するため、センサーの姿勢を水平に保つ必要がありました。このためセンサー内部に姿勢制御用のモーターを装備し、遠隔でセンサーの姿勢を調整できるようにしていましたが、更新後のシステムでは、センサーの姿勢を内蔵した傾斜計で測定し、この傾き分を測定ソフトウェア内部で補正することでモーター及び姿勢制御を不要としました。このように部品点数の削減を図りシンプルな機器構成とすることで、故障頻度の低減を達成しています。
また、マイクロホンの不調等、万一機器に故障が発生した際には自動で弊社保守拠点へと障害通知が行われます。保守拠点からは通信回線を通じてマイクロホンの動作状況、リアルタイムに収録されている波形や測定器稼働状態を遠隔で確認することができるため、現地に赴く前に障害内容の確認や一次復旧などの対応が即時に実施できます。
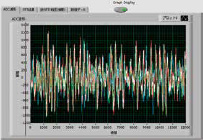
図7遠隔監視例(リアルタイム波形表示)
基本的なシステム設計理念はそのままに、これら最新技術の活用と工夫によって昇降機の小型化を含むセンサー軽量化、メンテナンス時の作業負担軽減、システム運用の効率化などを高いレベルで同時に実現することができました。
他にも、測定局では音響ベクトルセンサーから得られた音源の到来方向のデータと併せ、気象データと航空機が発するトランスポンダ応答信号電波や対地距離測定電波の受信結果から航空機の通過を自動識別するとともに、機種ID、航空機識別番号、高度情報、最接近情報、最接近時刻(測定局の真上を通過した時刻)等を記録しています。
A滑走路延長線上にはこのような測定器を4局配置し、通年測定を行っています。
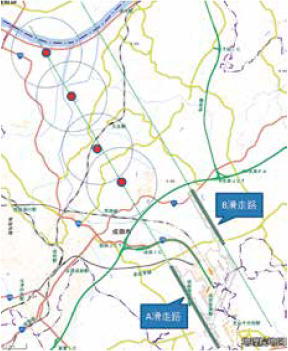
図8測定局配置図
図8に記載した赤い点が測定局の位置、青色の点線円は測定局1局あたりのおおよその捕捉範囲(半径1.5㎞)を表しています。
この捕捉範囲が互いに重複するように測定局を配置することで連続的に航空機の飛行位置を算出し、1便ごとの飛行経路を導き出しています。
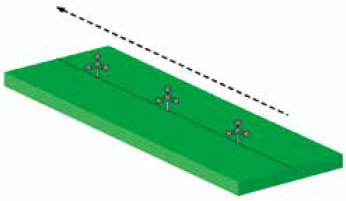
図9飛行経路算出の概念
飛行経路算出結果は図10に示したように、航空機の平面位置及び断面位置で構成されます。平面右下の黒い部分がA滑走路の北端、赤線が滑走路延長線を表しており、緑の点線が時々刻々の航空機位置算出結果です。
この例では離陸便を表示していますが、離陸後しばらくしてから右旋回し、通常の航路に対して多少の逸脱があったことがわかります。また、断面位置を確認すると、断続的に高度上昇をしていたことがわかります。
このように高度コース測定システムでは、時にイレギュラーな運航が行われた場合でも確実に捕捉し、実態を記録することができます。ADS-B電波を発信している航空機は7割程度と言われていますが、騒音を発生させない航空機は存在しません。95%以上という高い捕捉率を実現しているのは、ひとえに高度コースシステムが、必ず発生する航空機の騒音を基に飛行経路を算出しているからと考えています。
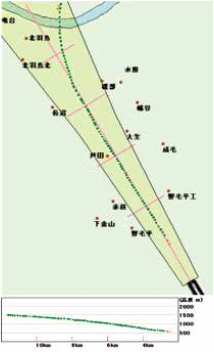
図10飛行経路算出結果
次に精度をADS-Bと比較してみます。図11の左図は高度コース測定システム結果、右図は左図にADS-B測定結果を重ねて描いたものです。右図では高度コース測定システムの捕捉範囲において、平面・断面とも高度コース測定システム結果の赤線とADS-B測定結果の青線がほぼ完全に一致し、赤線に青線が重なっていることがわかります。
これらのことから、高度コース測定システムでは高い精度と捕捉率を両立できていることを確認できました。
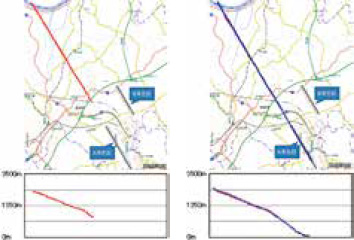
図11高度コース測定システムとADS-Bの結果比較
左図:高度コース測定システム結果のみ
右図:高度コース結果+ADS-B結果
6.おわりに
今回の更新を通じ、高度コース測定システムは航空機の飛行経路監視を行う上で非常に優れた製品であると再確認することができました。飛行経路監視に対するお悩みにお応えできるかと思いますのでお気軽にご相談ください。
最後になりましたが、本記事の執筆をご快諾いただきました成田市様に感謝申し上げます。