

DL事業部 忠平 好生、和田 浩志
ソリューション事業部 森尾 謙一
1. はじめに
当社が開発・販売する航空機騒音の自動測定器は、多数のユーザに利用されています。その特徴は、騒音レベルと航空機の発する電波を同時に測定し、電波の強さと騒音レベルの相関性に着目して航空機騒音か否かの自動識別を実現している点です。この方法により、航空機騒音が他の騒音より十分に大きい測定環境では、自動識別の精度は95%以上を実現しています。
最近では、空港の海上建設が進み、航空機騒音と他の騒音の大きさが同等となる環境でモニタリングを行いたいという需要が増えてきており、当社は上記の電波による自動識別に加えて、ビームフォーミングによる音源探査技術を導入することで、航空機騒音に他の騒音が重畳しているか否かを自動的に判定するシステムを開発しました。この製品は、羽田空港周辺で広く活用されています。
航空機騒音の環境影響評価については、これらの航空機騒音識別技術により自動化が進んでいます。しかしながら、騒音影響を低減する対応策を講じるためには、さらにいろいろな情報を収集してデータ解析を行う必要があります。その一つとして、航空機の機種による騒音曝露量の違いがあります。例えば、特定の機種の騒音曝露により、住民からの苦情が殺到したり、航空機騒音の評価量を大きく押し上げる場合には、その機種の空港への乗り入れを制限することにより、騒音影響を大きく低減する施策につながると考えられます。
このような施策を講じるには、観測された騒音が航空機によるものか否かを自動識別するだけでは不十分であり、その騒音の発生源となった機種を特定する技術の導入が不可欠となってきます。
沖縄の普天間基地に2012年から2013年にかけて配備されたV-22(オスプレイ)に起因して、沖縄の各地ではV-22の飛行に伴う低周波音の影響と思われる家屋のガタツキなどの苦情が増加しているというニュース記事を良く目にするようになりました。
当社は、V-22の低周波音について普天間基地周辺で独自に調査を行ってきましたが、V-22の音色は音声や楽器音のような倍音構造を有していることが分かり、この周波数特性に着目することでV-22の飛行を自動的に検知することができるのではと考えました。しかしながら、ドップラーシフト(音源の移動に伴って周波数がシフトする現象)による倍音構造の時間変化への追従や、類似するヘリコプタの倍音構造との判別をどうするかなど、多くの課題がありました。
本稿では、低域の周波数特性に着目し、音響解析と統計解析を駆使して航空機の機種識別を行う方法について紹介します。
2. 低周波域スペクトル構造
普天間基地周辺で観測された航空機騒音について、目視等により確認された機種毎の上空通過時の音声信号を周波数分析した結果、プロペラ機や回転翼機が低周波域で特徴的なスペクトル構造を有していることが分かりました。
図1はティルトロータ機のV-22、図2はヘリコプタのAH-1、図3はプロペラ機のC-130、図4はジェット機のC-35の上空通過音について時間周波数分析を行った結果を示したものです。それぞれ最大騒音レベルの観測時刻を中心に60秒間、250Hz以下のスペクトルを分析したもので、横軸が時刻、縦軸が周波数で、周波数成分強度をカラーマップ(低強度:青色~高強度:赤)で表現しています。

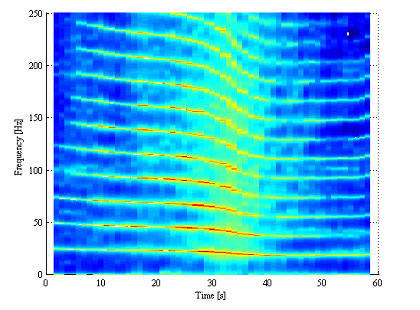
図1 ティルトロータ機(V-22)の低周波域スペクトル

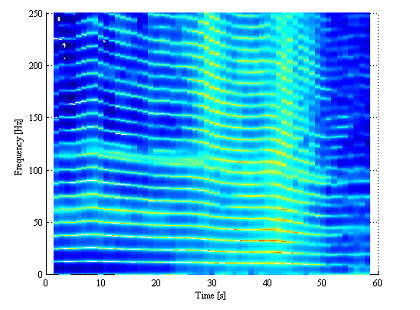
図2 ヘリコプタ(AH-1)の低周波域スペクトル

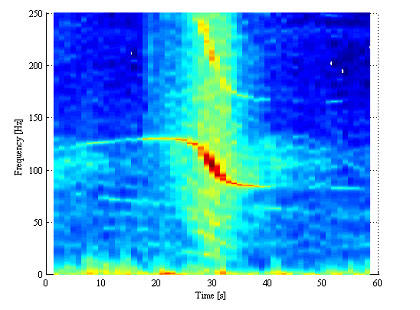
図3 プロペラ機(C-130)の低周波域スペクトル

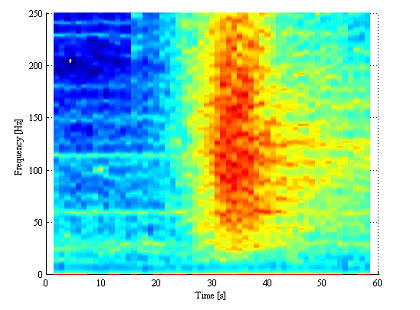
図4 ジェット機(C-35)の低周波域スペクトル
回転翼機やプロペラ機については、赤色の横筋が幾重にも重なっているのが分かります。また、横筋の構造を見ると、基音(最も周波数の低い筋にあたる周波数)の倍数となる周波数(倍音)にピークを有しています。さらに、航空機が上空を通過するのに合わせてピーク周波数が遷移しているのが確認できます。一方、ジェット機ではその周波数構造に鋭いピークは観測されていません。図1のV-22と図2のAH-1を比較すると、どちらも回転翼機のカテゴリに分類されるにも関わらず、異なるピーク周波数構造を有しています。つまり、低周波域におけるピーク周波数構造に着目することにより、音源である航空機の機種を識別できる可能性が高いということを意味しています。
3. 統計解析による機種識別
当社は「統計解析手法を用いた航空機騒音識別方法」を考案し、製品の開発や調査業務に活用しています。この方法の特徴は、測定された騒音に対してそれが航空機騒音であるか否かの予測確率値を算出するところにあります。例えば航空機騒音ではない騒音データの確率値は0%に近い小さな値として、明らかに航空機騒音であるものについては100%に近い大きな値として出力されます。このため、分析員は各データの確率値から識別結果が明らかなものについては実音聴取等の精査にかかる手間を省くことができ、データの信頼性を損なうことなく分析に要する労力や負担を大幅に削減できます。
この方法では、まず予め航空機か否かがわかっているデータベースを利用し、統計的に最適化された予測モデル式を作成します。作成したモデル式に分析対象となる未知のデータを入力すると、航空機騒音であるか否かの確率値が得られます。
航空機の機種識別を実現するにあたり、ドップラーシフトや対象以外の音の影響を受けても安定した識別精度を得られるよう、この統計解析によるアプローチを適用することを考えました。図5に解析アルゴリズムのブロックダイアグラムを示します。
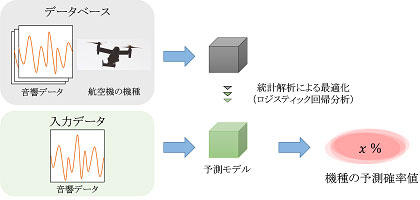
図5 統計解析による機種識別方法
まず、機種が判明しているデータに対し統計解析を行い、その結果を用いて機種毎に予測モデルを作成しておきます。作成した予測モデルに、未知のデータ(機種識別を行いたいデータ)を投入すると、その機種である確率値が結果として算出されるといった仕組みになります。
予測モデルを作成するのに様々なデータを用いることが可能な点が本手法の大きな特徴です。例えば、騒音レベル、低周波音圧レベル、振動レベル、周波数特性等の音響振動データだけでなく、航空機が通過した際に観測された特定の電波や画像を解析したデータ等もモデルの作成に利用可能です。ただし、モデル作成の元になるデータが、識別の対象(今回は航空機の機種になります)に特徴的であることが必要な条件になります。機種を識別したいのに、どの機種でも同様のデータになってしまうもの(上空音か否か等)を用いても有効な予測モデルは作成できません。
本稿では、低周波域におけるスペクトル構造が機種によって異なることに着目しているので、まずはスペクトル構造だけで作成した予測モデルにより、どの程度の予測精度が得られるのかについて基礎検討を行うこととしました。
図1から3の、ジェット機以外の機種の低周波域スペクトルを見ると、機種毎に特徴的なピーク周波数構造を有していることが分かります。横軸の中央である最大騒音レベルの観測時刻前後で、ピーク周波数が高いほうから低いほうへ遷移していますが、これはドップラーシフトによるものです。この周波数シフトのパターンは、航空機の移動速度や通過高度等により変化するもので、機種毎に特徴的なものではありません。そこで、機種毎に特徴的なのは倍音構造の違いであると判断し、倍音構造をモデル化する方法を検討しました。
倍音構造を抽出するためには、周波数分析を行ってその振幅特性から極大値となるピーク周波数を検出しますが、時々刻々と変動するピーク周波数を上手く捉えるため、音声認識の業界で用いられている線形予測分析(LPC分析)という手法を採用しました。
航空機からの音が測定されている瞬間の音響信号波形について、LPC分析を行った結果の一例を図6に示します。
図6 LPC分析によるピーク周波数検出例
横軸は周波数、縦軸は相対音圧レベルを表しています。青の折線がLPC分析による周波数振幅特性で、赤丸が検出されたピーク周波数になります。20Hz付近のピークを基音とした倍音構造を余すところなく検出できていることが分かります。図7に、図1で紹介したV-22の低周波域スペクトルについて、1秒毎にピーク周波数を検出した結果を示します。
図7 V-22のピーク周波数検出例
図7を見ると、図1で赤色の横筋で表現されていたピーク周波数のほとんどが上手く抽出されていることが分かります。しかしながら、測定点に航空機が接近し、上空を通過していく間には、近隣の暗騒音や風等の外乱の影響によりいくつかのピーク周波数が検出されないケースもあり、また各ピーク周波数における振幅値の相対差にも一定の規則性の存在を確認することはできませんでした。
そこで、検出されたピーク周波数のみを基礎データとして予測モデルを作成し、1秒間隔で予測確率値を算出するアルゴリズムを構築しました。もちろん、ドップラーシフトによる周波数の変化も考慮しています。これにより、航空機が接近して上空通過する間に特定機種の予測確率値が上昇すれば、その機種であると判定できることになります。
なお、本手法では、航空機の機種毎に特徴的な倍音構造を用いて予測モデルを作成しているため、航空機以外の騒音(生活環境騒音、道路交通騒音など)との識別にも利用することができます。例えば、飛行場内での整備のために長時間のエンジンテストを実施する際の騒音や、ヘリコプタのホバリングに伴う騒音など、従来の自動識別方法(電波による方法、音の到来方向に着目する方法等)では識別が困難であった地上騒音の自動識別にも威力を発揮できるものと期待しています。
4. 検証実験
2013年11月から12月にかけて、沖縄の普天間基地周辺において、アルゴリズム検証のための実験を行いました。図8に示す通り、測定点は滑走路南西端の延長線上に設けました。

図8 検証実験の場所(測定点)
測定は、低周波音圧レベル計(アコー製 TYPE 6238L)のマイクロホンを建物屋上のフラット面に高さ30cmとなるように設置し、全天候防風スクリーンを装着して行いました。低周波音圧レベル計のデジタル出力(1~80Hzの1/3オクターブバンド特性値並びにG特性音圧レベル値)をPCに連続記録するとともに、交流出力(音声信号)をオーディオインターフェースを介して連続録音しました。
また、市販の高解像度セキュリティカメラを2台持ち込み、滑走路延長方向に沿って北東向き、南西向きに設置し、1秒毎の静止画像を連続記録しました。これにより、航空機の上空通過時に音圧レベルが上昇した時刻の前後の画像を確認することで通過した航空機の機種を特定し、本アルゴリズムで判定した結果の精度を検証しました。
検証実験における機器の設置状況を図9から図11に示します。

図9 低周波音圧レベル計マイクロホンの設置状況

図10 データ収録機材の設置状況

図11 セキュリティカメラ2台の設置状況
7日間の測定で、セキュリティカメラの画像により上空を通過した航空機の機種が確認でき、かつ、低周波域において特徴的なピークが観測された時間(秒数)の総計は4420秒でした。そのうち、最初の2日間の944秒分のデータを用いてV-22の予測モデルを作成し、残りの5日間の3476秒分のデータより算出した予測確率値と画像判定の結果を比較することにより、本アルゴリズムの精度検証を行いました。
図12にV-22の予測結果の一例を示します。横軸が時間経過を表し、ある1機の航空機の接近から上空通過までを切り出してプロットしたもので、左側の縦軸はG特性音圧レベル(LGeq) の1秒間平均値、右側の縦軸は算出された1秒毎の予測確率値になります。V-22の接近から上空通過の間に、LGeqの波形が上昇して下降する変化を示していますが、LGeqが最大レベルとなる時刻の前20秒間程度の区間にV-22の予測確率値が大きく上昇しています。つまり、この単発騒音の音源となった機種がV-22である可能性が高いということを表しています。
図12 V-22 の予測確率値の例
判定精度の検証のため、1秒毎の予測確率値について2つの正解率を算出しました。1つは画像判定によりV-22であると判明したもののうち、V-22の予測確率値が50%以上となったものを正解として集計したもの(正解率A)で、もう一つはV-22以外であると画像判定されたもののうち、V-22の予測確率値が50%未満となったものを正解として集計したもの(正解率B)です。集計結果を表1に示します。
| N | 正解率A | 正解率B | |
| V-22 | 611 | 79.5% | 82.4% |
Nは画像によりV-22と判定され、かつ、低周波域において特徴的なピークが観測された時間(秒数)の総計です。どちらの正解率も80%程度の結果が得られていますが、本手法の実用化のためには9割の正解率が不可欠です。そこで再度、V-22のピーク周波数構造とセキュリティカメラの画像を洗い直した結果、ある規則性を見出すことができました。

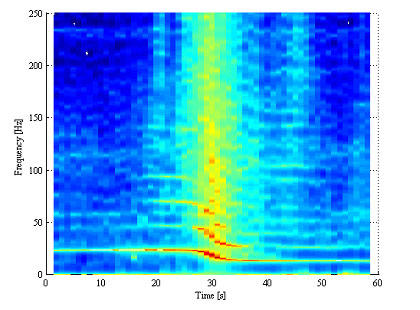
図13 V-22の飛行モードの低周波域スペクトル

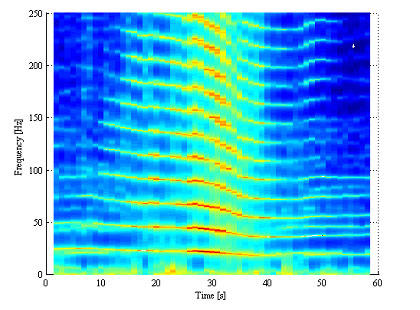
図14 V-22のヘリモードの低周波域スペクトル
ティルトロータ機であるV-22は、回転翼機とプロペラ機の双方の特徴を有しており、垂直離着陸が可能な特殊な機種となっています。離着陸時には両翼の先端にあるプロペラを垂直に回転させ、ヘリコプタと同様な飛行形態(ヘリモード)となります。一方、上空飛行時にはプロペラを水平に回転させることで、プロペラ航空機と同様な飛行形態(飛行モード)となります。
今回の測定点は、滑走路南西端に非常に近接する場所であり(図8参照)、V-22が南西より進入する際、滑走路を低空通過する場合は飛行モード、着陸する場合はヘリモードで上空を通過していることが分かりました。また、ヘリモードで進入した後、飛行モードに遷移して滑走路を低空通過する事例も多数観測されていました。図13と図14に、それぞれV-22が飛行モードとヘリモードで上空通過した際の時間周波数特性を示します。
ヘリモードの場合は高次の倍音によるピークまで鮮明に観測されるのに対し、飛行モードの場合は2次、3次の倍音によるピークまでしか観測できないのが分かります。この点に着目し、ヘリモードと飛行モードで別の予測モデルを作成し、再度検証を行いました。
図15に2つの予測モデルを用いて算出した予測結果の一例を示します。LGeqが最大レベルとなる時刻の前はヘリモード、その後は飛行モードの予測確率値が上昇しています。つまり、測定点上空を通過する際にヘリモードから飛行モードに遷移している様子が表現されているのが分かります。
図15 V-22(ヘリ&飛行モード)の予測確率値の例
表1と同様に、飛行モードとヘリモードのそれぞれについて2つの正解率を集計した結果を表2に示します。
| N | 正解率A | 正解率B | |
| V-22(飛行モード) | 103 | 80.6% | 90.7% |
| V-22(ヘリモード) | 508 | 89.6% | 95.0% |
表1と比較すると、飛行モードとヘリモードの2つの予測モデルを作成したことにより、明らかに判定精度が向上しています。特にヘリモードの正解率は当社の目標値である90%程度にまで到達しています。飛行モードの正解率はもう一歩といったところですが、ヘリモードに比べてデータ数が少ないのが要因の一つと考えられ、より多くのデータを収集することにより、さらに正解率が向上すると考えています。
ところで、V-22以外の機種についても、低周波域におけるピーク周波数構造が特徴的であれば、同様の手法により識別することが可能です。
攻撃型ヘリコプタのAH-1は、図2に示すようにV-22より低い基音を持つ倍音構造が特徴的です。AH-1の予測モデルを作成し、予測確率値を算出した例を図16に示します。
図16 AH-1の予測確率値の例
この例は、AH-1が測定点上空を通過した際の予測結果ですが、V-22の飛行モードとヘリモードの予測モデルを用いて算出したV-22の予測確率値を合わせてプロットしています。AH-1の予測確率値が上昇している一方、V-22の予測確率値は飛行モード、ヘリモードともにほとんど反応していないのが分かります。
5. おわりに
本稿では、低周波域における特徴的なスペクトル構造に着目した航空機の機種識別方法について紹介してきました。沖縄の普天間基地に配備されたV-22について、現場実験のデータを用いた検証により、現時点で約90%の精度で機種を特定できることが立証されました。また、V-22以外の機種についても、同様の手法により機種識別が可能であることも確認できました。今後もデータ収集を継続的に実施し、予測精度の向上を目指し、また多数の機種について予測モデルの作成を進めていきたいと考えています。
本手法の実用化により、V-22の飛行に伴う低周波音の影響と思われる家屋のガタツキなどの苦情に対して、その要因がV-22の飛行によるものか否かを明確にすることが可能となります。この成果が、現在苦情が寄せられている、あるいは今後V-22の導入が予定されている飛行場周辺の地方公共団体等に対し、騒音行政施策の一助になれば幸甚です。