

データサイエンス事業部 忠平 好生 小橋 修
1. はじめに
私どもが航空機騒音の自動測定装置に関わり始めたのは昭和60年代でした。当時、成田空港周辺の航空機騒音が大きな問題となっており、騒音監視を行う千葉県様や成田市様の要望を受けて、自社開発により航空機騒音自動測定装置を製作しました。当初は騒音計から得られる騒音レベルだけを頼りに航空機騒音を自動で検出してい
ました。成田空港は陸上空港ということもあり、その周辺では騒音レベルだけでも比較的容易に単発騒音の検出ができていましたが、それでも周辺道路を通過する車の騒音や、時期によりカエル、セミ、鈴虫などの鳴き声といった自然音による誤認も散見されました。そこで、昭和62年に航空機が発する電波と騒音レベルの推移に着目した航空機騒音の識別装置を開発・提供を始めると、この製品の優れた識別精度とコンパクトさが認められ、現在まで34年に渡り全国各地の空港・飛行場周辺で多数利用されるに至りました。今では環境省の航空機騒音測定・評価マニュアルでも航空機騒音の標準的な識別装置として引用されています。
今回はこの航空機騒音識別装置の最新版として、新たに航跡取得機能を実装した新型識別装置を開発しましたので、その概要を紹介させていただきます。
2. 電波による航空機識別技術
私どもがこれまで取り組んできた電波による航空機識別技術は、トランスポンダ応答信号と対地距離測定電波に着目したものになります。
航空機は管制のためにトランスポンダ応答信号と呼ばれる特有の電波を発しています。その電波を騒音レベルと同時に監視することにより航空機とそれ以外の騒音を識別しました。この識別装置が最初に開発されたもので型式名がRD-90になります。
この装置はトランスポンダ応答信号に含まれる航空機ごとに与えられる識別番号(スコークコード)と高度情報を得ることができるため、複数の航空機が錯綜していても分類することができ、また高度の時間変化に着目することで離陸なのか着陸なのかの判定も可能です。また屋外に置かれるセンサーはマイクや防風スクリーンといった消耗するものではなく、メンテナンスフリーなアンテナであることで取り扱いも容易であるなど、音の到来方向などに頼る識別装置に比べて、様々な優位性がありました。
一方で、航空機が近接している間は電波を受信しているため、その間に航空機騒音より大きな騒音が発生してしまう、いわゆる重畳音が発生した場合に、これを航空機騒音と誤認してしまうという新たな課題もあがりました。
そのため対地距離測定電波を用いた第2の識別装置を開発しました。型式名はRD-100です。対地距離測定電波は航空機が地上面からの距離を測るための電波で指向性が鋭く、地上面で反応する時間は航空機が測定局に最も近い点に達した際の時刻の前後1秒から2秒程度と短いことから、最接近時刻を正確に測定することができます。この最接近時刻と最大騒音レベル発生時刻の関係から重畳音を自動判定する機能を追加しました。
3. 新型開発における機能拡充
このようにして私どもの航空機識別装置は航空機騒音かその他の騒音かの自動識別と重畳音の自動判定を可能としてきました。一方で航空機騒音監視に対する認識も大きく変化し、測定局での騒音レベルの監視だけでなく、航空機がどのように飛行しているのか、すなわち航跡の監視測定を必要とするニーズが高まっておりました。
航跡データは航空機騒音の対策に有用で、決められた飛行経路を順守しているかの確認、騒音等の苦情対応に向けた航空機の飛行状況の確認、騒音被害の大きい飛行経路の見直し(空港・飛行場運営者への申し入れ)、航空機騒音の面的評価や将来予測のための基礎データ作成など、様々なニーズが存在していました。
私どもは航跡データを得るために、有人調査や音源到来方向を用いた自動測定システムの提供などを行ってきましたが、現在のお客様の声としては、より広範囲における航跡の把握が求められていました。そこでより広範囲で正確な航跡を自動で測定することを可能とするために、これまで培ってきた管制に用いられる電波を利用する技術を活かした航跡取得の開発を始めました。
現状における電波を利用した航跡測定の手法としてはADS-B、PSSR、MLATと呼ばれる3つが挙げられます。以下に、それぞれの手法における特徴を述べます。
【ADS-B】
Automatic Dependent
Surveillance-Broadcastの略で、航空機が絶えず現在の位置と高度を放送するシステムです。航空機が発するトランスポンダ応答信号にはこのシステムによる情報が追加され、スコークコードと高度情報だけでなく、航空機がGPSにより測位した自身の位置情報や個体識別アドレスといった、これまでよりも詳細で様々なデータを送信するようになりました。この情報を受信・解析することにより航跡データを得ることができます。この技術はFlightradar24といったwebサイトでも用いられていますし、一般の人でもインターネットで受信セットを購入すれば簡単に航跡データを得ることができるので、安価で容易な航跡データの取得方法と言えます。欠点としては、すべての航空機の航跡が取得できるわけではないということがあります。海外では民間機にADS-Bの搭載を義務化しているところも多いのですが、日本ではまだ義務化はされていません。そのため、国際線の多くはこのデータを受信できますが、国内線の比較的古い機体や小型のプロペラ機、ヘリコプターなどは搭載されていないものが多く、そういった機体の航跡データを得ることはできません。成田空港や関西空港といった国際線が多い空港は9割以上の航跡データが取得できますが、国内線が多い地方の空港では5割程度といったこともしばしば見られます。また、軍用機はごく一部(民間機を軍用に転用したものなど)を除き、ADS-Bは搭載されていません。
【PSSR】
Passive Secondary Surveillance Radarの略で、受動型二次監視レーダーといいます。管制に用いるレーダーはSSR、二次監視レーダーと呼ばれますが、SSRから送られる質問電波と、これを受けて航空機から発せられるトランスポンダ応答信号(応答電波)の双方を受信・解析することにより、航空機の位置を求める手法です。1980年代に確立されたこの航跡データを得るための手法は、国土交通省航空局の航跡調査における標準仕様書にも記載されています。SSRの質問電波は、SSRの回転速度や質問信号を発する時間間隔など、SSRごとに決められたパターンにより送信されるため、航跡データを得るためにはこのパターンに応じた解析が必要です。この解析技術は各社腕の見せ所になるのですが、私どもは機器の製造から解析まで自社で開発を進めていますので、現在でも他社には解析できないパターンでも航跡データを取得することが可能ですし、将来的にこれまでになかったSSRの質問パターンが出てきた場合でも、それに合わせた機器の改良と解析方法の開発ができる準備をしています。
なお、SSRは空港・飛行場周辺だけでなく、航空路監視レーダー(ARSR)にも装備されており、日本の領土のほとんどがレーダー覆域に入っています。また、民間機だけでなく軍用機もSSRの質問に応答するため、国内の空を飛行する航空機はすべてこの手法で航跡を取得することが可能です。欠点としてはSSRの回転が約4秒又は約10秒に1回の周期となるため、得られる航跡データも約4秒又は約10秒に1個と少し粗いことが挙げられます。またSSRは正面方向に鋭い指向性を持つアンテナにより質問を送信していますが、指向性の幅が約3度になっているため、SSRから航空機までの距離が遠くなると捕捉された位置の精度が低下することになります。さらに質問及び応答電波が建物などで反射されたものを拾うことがあり、エコーと呼ばれる虚像の出現やノイズが混入することもあります。
【MLAT】
Multilaterationの略、マルチラテレーションと呼ばれます。航空機の応答電波のみを用いて航空機の位置を求める手法です。3点以上の応答電波受信器により、ぞれぞれの受信時間差を用いて航跡を算出します。一見簡単そうに見えるかもしれませんが、電波の速度は光と同じで秒速約30万キロであり、数キロ程度しか離れていない測定局間での時間差を正確に測定するにはμsec単位での時刻同期が必要になります。また複数の航空機から様々な応答電波が発信されますので、それぞれを分離して分析する必要があります。
MLATも歴史は古く、1970年代に米国にて開発が始まり、国内では空港面を滑走する航空機の位置を監視するシステムとして国土交通省航空局が導入しました。その後、上空を飛行する航空機の位置を監視する広域マルチラテレーション(WAM、Wide Area Multilateration)に発展しています。
MLATもPSSRと同様に民間機だけでなく軍用機の航跡も取得可能ですが、SSRの質問電波に頼らないため、複数地点で同一の航空機からの応答電波を同時に受信さえすればその位置を正確に算出することが可能で、PSSRよりも細かい時間間隔で精度の高い航跡が得られます。欠点としては3点以上の複数地点で同一の応答電波を受信することが肝要で、広いエリアの航跡を得るためには受信装置のロケーションの綿密な設計と、受信感度の十分な調整が必要になる点です。
今回開発した新型識別装置はこの3つの手法による航跡データの取得が全て可能となっています。
4. 新型識別装置による航跡測定例
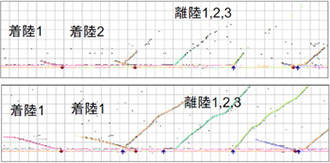
新型識別装置で航跡を取得する際に1つ大きく工夫した点があります。これまでは測定器周辺に到来する航空機が発する電波を適切な感度で受信すればよかったので、航空機からの距離が近い場合は受信できる感度の上限を超えないよう受信感度を小さく、逆に遠い場合は受信感度をあげて適切に設定するなど、測定局と航空機との距離関係を考慮して受信感度を調整していました。しかし広範囲の航跡を取得する場合は、近い場合でも遠い場合でも、適切な受信感度を得る必要がありました。そのために受信した電波の強さに合わせて自動で受信感度を調整する機能を加えています。この機能はオートゲインコントロールと言われ、一般の無線機器などには搭載されている機能ですが、これを新型識別装置に合わせて開発し実装しています。以下の図は空港内で滑走路が見渡せる位置での受信感度を示した例で、上段の図はこれまでの識別装置、下段が新型識別装置で受信した結果になります。縦軸は飛行高度を表し横軸は時刻です。着陸1の下に出ている右肩下がりの線は時刻が進むにつれて高度が下がっていますので着陸であることがわかります。離陸1,2,3とかかれたところにある3つのラインは時刻とともに高度が上がっていますので離陸になります。これまでの識別装置では空港近くで航空機が近いため最も強い電波を受信した場合でも上限を超えないように調整しているため、着陸機においては着陸寸前のわずかな時間だけ受信しており、離陸機においても上空高くあがると、すぐに途切れてしまっているのがわかります。一方、新型識別装置ではオートゲインコントロールの機能により、着陸も離陸も長い間データが取得できていることがわかるかと思います。
この新型識別装置を用いて取得した航跡データの例を紹介します。まず、同一航空機の航跡をADS-B、PSSR、MLATの3つの方法で算出したものを比較しながら、それぞれの航跡の特徴を説明します。
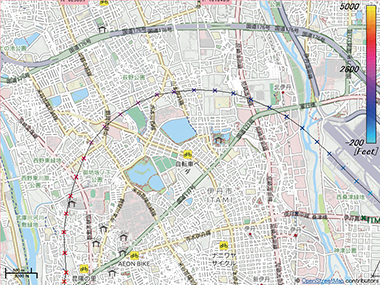
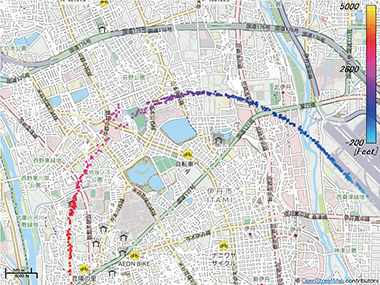
この例は伊丹空港のB滑走路を北向きに離陸した航空機の航跡になります。ADS-Bは航空機に搭載されたGPSの位置座標になりますので、細かい時間間隔(約1秒)で正確な飛行位置が得られているのが分かります。PSSRはSSRの回転周期(ここでは約4秒に1回転)に合わせて1つの位置座標が算出できるため、約4秒に1点の飛行位置が得られることになります。また、SSRアンテナの指向性の幅による若干の誤差があることが見て取れます。MLATはPSSRに比べて非常に密度の高い航跡が得られており、その精度も高いことが分かります。一部に乱れている個所が見受けられますが、この実験では空港から2km以内の近距離に受信装置を配置したため、原理的に位置座標の算出が難しい2つの受信装置の直線上を航空機が通過したことが原因です。
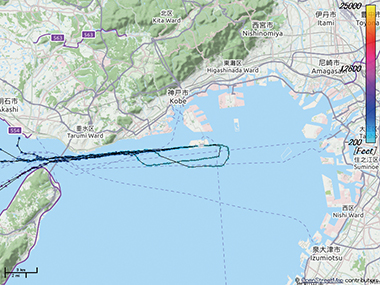
次にPSSRの例で関空、伊丹、神戸の3空港を対象に、広域と空港周辺それぞれの図を示します。まず3空港の位置関係を図10に示します。

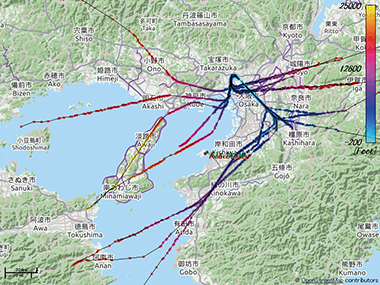
この3空港を対象に、関空のある位置1点に新型識別装置を仮設置して、PSSRの測定を行いました。関空は海上にあり、障害物が少なく3空港とも見渡すことが可能なため1地点で3空港を離着陸する航空機の航跡データを取得することができました。
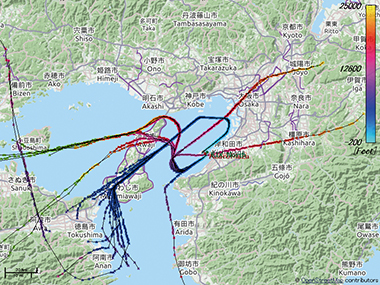
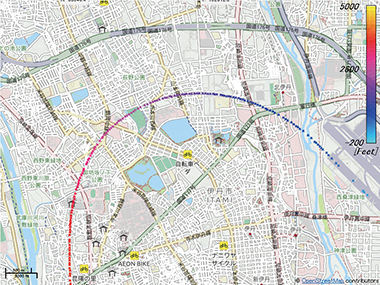
まず関空ですが、少なくとも空港周辺から半径30NM(ノーチカルマイル、およそ55km)の範囲の航跡データが取得できています。航跡データの高度は色で表しており、青によるほど高度が低く、赤から黄色に向かって高度が高くなります。図の右側にある判例を参照ください。図11は空港から南側に離陸し、北側から着陸しています。
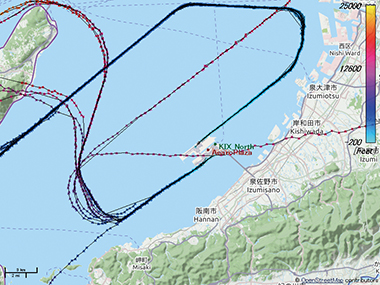
空港周辺にクローズアップしたものを図12に示します。空港から離れると若干航跡がばらつきますが、着陸に向かう収束点などはきれいに航跡データの取得ができています。
次に伊丹空港です。こちらも10NMを目標に航跡取得を行いました。北側に離陸、南側から着陸しています。
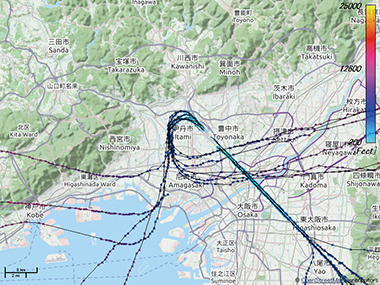
次に空港周辺です。伊丹空 港はA、B滑走路と2本の滑走路がありますが、それぞれの滑走路からの離陸、着陸している様が見てとれます。
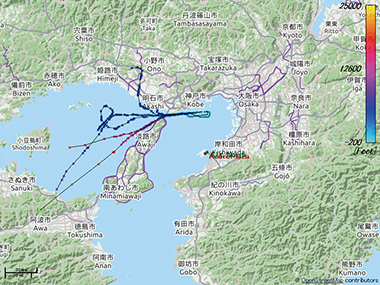
最後に神戸空港です。こちらも概ね10NMの範囲は取得できています。
空港周辺でみると着陸の航跡データがきれいに描かれていることがわかります。
5. 今後の展望
最後に新型測定器の設置写真を掲載します。SSRは航空管制を目的としたレーダー設備であり、情報の秘匿化や情報量の付加など今後も随時の機能向上が行われます。SSRの進化に新型識別装置も対応していくとともに、電波による航空機識別と航跡捕捉に関する技術を更に研鑽し、航空機騒音対策に有用な製品・サービスの開発を進めていく所存です。
今回、実験データの収集に際し、場所のご提供等でお世話になりました関西エアポート(株)の皆様に感謝の意を表します。


