

成田市空港対策課 林 直樹
千葉県環境部 岡部 隆男
日本音響エンジニアリング株式会社 奥田 庸雄・鶴 秀生・大橋 心耳
1. はじめに
日本の首都東京の空の玄関となる新東京国際空港(成田空港)は、都心から66Kmに位置する千葉県成田市及び芝山町にまたがる丘陵地に、 1978年5月に開港し、現在、4,000m滑走路1本で運用され、1日に約340機の航空機が離着陸しています。
空港は、典型的な内陸空港であり、空港周辺及び飛行経路周辺には民家が点在しています。 そのため、空港周辺の環境監視、特に騒音の監視が必要とされました。
我々は、空港の開港当初から、騒音監視に係わりを持ち続け、正確で効率的な測定手法を追求してきました。
さらに、これらの手法は、新東京国際空港のみだけでなく、東京国際空港、大阪国際空港、関西国際空港、広島空港など、 他の空港においても採用されつつあります。
今回は、その測定手法の変革と将来像を紹介します。
2. 騒音監視の目的
日本における航空機騒音の評価量は、ICAOによる国際基準を一部簡略化したWECPNLが用いられおり、次式のとおり表されます。
WECPNL = dB(A) + 10 log10N - 27
ただし、dB(A):航空機の騒音レベルのエネルギー平均値
N:1日の発生時刻による補正を行った飛行回数
N = N2 + 3N3 + 10(N1 + N4)
N1: 0:00~ 7:00の飛行回数N2: 7:00~19:00の飛行回数N3:19:00~22:00の飛行回数N4:22:00~24:00の飛行回数
航空機騒音の環境基準は、住居地域で70WECPNL以下、その他の地域で75WECPNL以下と定められており、 新東京国際空港周辺において、空港敷地及び工業専用地域を除くそれぞれの地域に環境基準が適用されています。
また、航空機騒音による障害を防止するための法律により、第1種地域(75WECPNL以上)では住宅の騒音防止工事への助成、 第2種地域(90WECPNL以上)では住居移転の補償、第3種地域(95WECPNL以上)では緑地帯などの緩衝地帯の整備が政府に義務付けられています。
空港周辺の自治体が騒音調査を行う目的としては、第一に環境基準の達成状況の確認にあり、 第二に騒音防止工事への助成地域などの線引きの妥当性を確認することにあります。
3. 騒音監視の歴史
空港周辺の自治体による騒音調査は、開港当初から現在にいたるまで継続的に実施しています。その測定手法の変遷を以下に示します。
図1 騒音計とレベルレコーダによる測定
3-1 騒音計とレベルレコーダ(第1期)
騒音分布状況を把握するため、開港直後1年間は年4回(四季調査)、 その後は毎年、風向により空港北側への離陸が卓越する冬季、空港南側への離陸が卓越する夏季の2回、 連続する7日間(1週間)の調査を、空港周辺の約50地点で実施してきました。
測定方法は、図1に示すように、騒音測定の最も基本系である騒音計とレベルレコーダを用い、 各調査地点に調査員を配置し、目視による航空機の飛行と騒音レベルを確認するものでした。 その後、省力化のため、代表地点だけに調査員を常駐させ、他の地点は巡回して測定器の作動状況を確認する形に変わりました。
いずれの場合にも、この方法は、測定と解析に多くの人手と経費を要するものの、短期間の結果しか得られないことに問題がありました。
3-2 自動測定装置の開発(第2期)
前述の方法では年間を通じた騒音レベルを把握できないことから、1984年ごろから自動測定装置の検討を始めました。 その当時にも、いくつかの騒音計メーカーから自動測定機が製品化されており、成田空港周辺でも開港当初から飛行経路直下の6地点に設置していました。 しかし、その測定機は、それぞれに設定した騒音レベルをある時間継続して超過した場合に航空機騒音と見なし、 騒音ピークレベルとピーク時刻をプリンターに印字するだけで、自動車などの航空機騒音に類似する騒音も含まれていたため、 それらの測定機による結果は、大まかな傾向の把握のみに使われていました。
新たな自動測定装置の検討に当たっては、データ処理の省力化とランニングコストの低減化を目的に、
- 測定データは、すべてコンピュータ処理する。
- 使用するコンピュータは、汎用コンピュータでなく、当時、普及しつつあったパーソナルコンピュータとすることを基本としました。
様々な検討を経て完成した自動測定装置は、騒音計出力をA/D変換し、マイクロプロセッサーの制御により、 フロッピーディスクなどの媒体に記録するもので、1985年から設置を開始しました。
測定は、これまでの測定機と同様に、設定騒音レベルをある時間継続した場合に記録するものとしたため、 依然として航空機騒音以外の騒音を含む可能性がありました。
そこで、データを処理する際に、例えば、A地点からB地点の方向へ飛行する航空機であれば、 まずA地点で観測され、次にB地点で観測されるため、各測定点で観測されたピーク時刻が時系列に並ぶものだけを採用する方式としています。 さらに、ピーク時刻の変わり方から、航空機の飛行方向(離陸又は着陸)をも判別しています。

図2 自動監視システム(DL-80/R)のブロック図及び写真
これらにより、自動測定装置による観測が、前述した観測員が常駐して測定する場合と同程度の精度でできるようになりました。
3-3 自動測定装置の展開(第3期)
当初設置した自動測定装置は、測定結果をフロッピーディスクに記録するものであったため、 定期的(1回/月)に回収し、その期間をまとめて集計処理するものであり、即時のデータ処理には適していません。
そこで、1987年に、各測定装置と集計処理コンピュータを通信モデムにより電話回線で接続し、 オンライン処理できるように改造しました。なお、通信回線は常時結ばれているものでなく、航空機の飛行の可能性が低い深夜の時間に、 一般の電話回線を使用し、各測定装置での前日1日分の測定データを一括して自動的に回収するものとしています。
自動測定装置による観測が安定的に行えることから、1985年に6カ所であった設置地点は、 1996年現在、千葉県内と隣接する茨城県を含め、55カ所で常時監視を実施しています。これらの地点は、 開港当初から実施していた多くの人手を要した短期間の調査地点をほぼ包括できるものとなっています。
図3 空港周辺の常時監視局位置図
(1) ポータブル型測定装置の開発
常時監視を行う測定装置は、頻繁に移動させるものでないため、かなり大きなものとなっていますが、 常時監視地点以外の地点で臨時に短期間(1週間から数ヶ月)の測定を実施する場合があるため、 常時監視用の測定装置と同様の機能を有するポータブル型の測定装置を開発しました。
ポータブル型は、頻繁に移動させるものであるため、ディスクドライブなどの機械駆動部分をなくし、 データ記録もRAMメモリーカードとしました。また、設置場所も過酷な条件となる場合があるため、装置全体を衝撃防止ケースに収納し、防水仕様としました。 なお、データの記録様式は、常時監視の装置と同じとし、同様の集計処理が可能となっています。
(2) 航空機騒音識別装置の開発
騒音の監視地点では、航空機以外の様々な騒音が発生しています。測定装置は、騒音レベルの時刻変化で監視しているため、 形態が類似する騒音、例えば自動車騒音、鳥の鳴き声、拡声器によるアナウンスなどをデータとして取り込むことがあります。
新東京国際空港周辺の監視システムでは、航空機騒音の抽出を前述した騒音ピーク時刻の時系列処理により行っていますが、 空港側面の地点や単独で観測を実施する場合などでは、使用できません。
既存の識別装置には、空間相関法により上空の音源を特定するものがありましたが、鳥の鳴き声を誤認したり、 強風などの気象条件により識別率が低下する難点がありました。
そこで、我々は、それらの条件に左右されない、航空機が発する特有の電波に着目しました。
開発した識別装置は、飛行中の航空機から出しているトランスポンダ応答信号電波(1090MHz)を常時受信し、 その電波の電界強度の変化を識別の目安としています。
航空機が測定地点に接近すると、騒音レベルが上昇すると共に、トランスポンダ信号の電界強度も上昇するため、 航空機の特定が可能となります。
実際の航空機に対する装置の識別割合は、あらゆる条件下でも98%以上あり、ほぼ確実な自動識別が可能となっています。
なお、この装置は平成4年7月に特許を取得しています。
4. 飛行高度コース測定
航空機による騒音レベルは、測定地点(受音点)と航空機の位置関係により大きく変化します。 また、空港への離着陸には、一定のコースが定められていますが、特に離陸機の飛行コースにはバラツキが見られます。
そのため、騒音分布を把握するためにも、航空機の飛行高度コースを定量的に把握する必要性を開港当初から持ち続けていました。
4-1 簡易測定(第1期)
飛行高度コースの大まかな傾向を把握するため、簡易に、身近なものを利用して測定することを1983年ごろから始めました。 利用した道具は、大型分度器とカメラです。
測定は、飛行経路の側方で、航空機の機体が測定点に対して真横になった時、写真を撮影すると同時に、 分度器で仰角を読み取ります。分析は、実際の航空機の長さ、フィルム上の機影の長さ及びカメラの焦点距離から航空機までの距離を計算し、 仰角と航空機までの距離から、測定地点を含む飛行経路に垂直な断面での通過位置を求めるものです。
ただし、この方法では、ある断面での把握に限られること、旋回する航空機や夜間の測定ができないことなどの理由から、 飛行コースの傾向を把握するに留まりました。
4-2 経緯儀による測定(第2期)
連続した航空機の軌跡を把握するには、2地点で同時に連続した測量(方位角、仰角)から求めることができますが、 従来の測量機器では、操作するのに航空機の早い動きについて行けないことがありました。
そこで、航空機の飛行位置を測量するための特別な経緯儀を開発しました。 経緯儀は、正立像の望遠レンズを水平面、垂直面に自在に動かせるようにしたもので、方位角及び仰角は、 それぞれの動作部に取り付けたエンコーダから0.1度の精度で出力されます。
図4 飛行高度コース測定結果(B747:離陸機)
測定は、望遠レンズを覗きながら航空機の軌跡を追いかけ、レンズの中央部に航空機が捉えられた時にスイッチを押せば、 時刻、方位角及び仰角が記録される機構となっています。記録のタイミングは任意に行え、連続したデータが記録されます。 分析は、2地点で測定したデータを照合して三角測量の方法により航空機の軌跡を算出します。
この方法によれば、夜間においても航空機の燈火を目標に測定することができ、図4に示すとおり、 十分な視界があれば10kmから20Kmにわたり飛行経路を追跡することができ、測定誤差も概ね数十mの範囲にあります。
なお、この測定は、新東京国際空港において1988年から毎年継続的に実施されています。
4-3 飛行高度コースの自動測定(第3期)
経緯儀による測定は、基本的に人間の目によるものであり、雲や霧などの天候に影響を受けることから、 短期間の限られた条件の中での把握でしかありません。
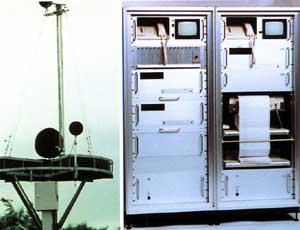
図5 飛行高度コース自動測定システムブロック図及び写真
そこで、年間を通じた飛行高度コースの分布を把握するため、1989年に空港北側(成田市)の2カ所に自動測定システムを設置しました。
システムは、飛行経路を挟むように、経路直下から両わきに約1km離れた地点に設置した2台の測定機器から構成されます。 各測定機器では、複数のマイクロホンにより、互いに直交する3軸の音響ベクトルから音源の到来方法を求めます。 測定は、互いの測定機器設置地点の方向に航空機がある時の音源到来方向(仰角)から、2地点を含む断面(飛行経路に垂直な断面)を通過する位置を特定するものです。
なお、航空機以外の取り込みを防ぐため、前述した識別装置により、 トランスポンダ信号の電界強度が一定以上になった場合に音響ベクトルを計測を行うようにしています。
また、最近ではこのシステムに改良を加え、1994年に東京国際空港(羽田空港)周辺に設置したシステムでは、 測定地点を中心に数Kmの範囲で、連続的な飛行軌跡を自動観測することが可能となっています。
図6 自動測定システムによる測定結果(断面図)
図7 飛行目的地別の高度比較(B747:離陸機)
5. 騒音シミュレーション
新東京国際空港の周辺では、50ヶ所を超える地点に自動測定装置が配置され、 相当に広い範囲で年間を通じた航空機騒音の把握が可能となっています。
しかし、騒音コンターを正確に確認しようとするには、まだ測定地点の数が足りません。 また、それを実測により行なうには、無数の測定施設が必要となり、現実的でありません。
そこで、常時測定地点の間、さらには測定地点の外側の騒音状況を把握する目的で、実測調査に基づくシミュレーションを行ないました。
航空機騒音シミュレーションでは、米国FAAのINMがもっとも一般的であり、日本でも環境アセスメントなどの予測計算に使われています。
われわれのシミュレーション手法も、基本的にINMの考えを踏襲するものですが、実測調査結果を補完することが目的であるため、 飛行パターンは勿論、各航空機種の騒音レベルも実測に基づく独自のデータベースを作成し、計算を行ないました。
5-1 調査の方法
調査は次の手順のとおりです。
1. 飛行パターンの作成
飛行軌跡の調査は、前述した経緯儀を使用し行いました。飛行パターンは、機種、飛行方向の別に整理しましたが、 図7に示すとおり、同機種であっても、遠距離便ほど上昇角度が低い傾向があるため、 目的地までの飛行時間により遠距離、中距離、近距離に分けて集計しました。
そのため、採用した離陸の飛行パターンは、B747で6種類、DC10で4種類、B747-400で5種類、 B747Sで4種類、その他A300、B767、MD11など合計34種類となりました。なお、着陸のパターンはほぼ一定であるため、各機種1種類としました。
図8 騒音レベル曲線の例
図9 予測シミュレーション概略フロー図
2. 騒音レベル・スラントディスタンス曲線
各航空機の騒音レベルとスラントディスタンス(航空機と受音点の距離)の関係を求めるため、 飛行軌跡の調査と同時に、飛行経路の直近から遠方まで配置した各測定地点で、騒音測定を行いました。
測定は、航空機1機ごとの騒音データについて、1/1オクターブバンドの周波数分析を行い、 飛行軌跡データとともにデータベース化しました。
機種ごと騒音レベル曲線は、データベースから、オクターブバンドごとの騒音レベルとスラントディスタンスの関係を求め、 それらをdB(A)に合成する方法で作成しました。
なお、測定は気象条件の異なる時期に分けて実施し、約3000機のデータを収集しました。
シミュレーションフロー
今回の予測シミュレーションの概略フローは、図9に示します。 なお、データ整理にあたり、空気吸収及び地表面減衰量についてはSAEの方法(ICAO/ANNEX16/1988)を参考にし、 シールディング効果量はFAAの方法を利用しています。
5-2 予測結果
この手法による予測結果について、常時測定局で実測された騒音測定値と比較したところ、 概ね±1dBの精度であることが確認できました。また、さらに広い範囲での騒音影響を予測することが可能であると考えています。
なお、予測結果例(騒音コンター)を図10に示します。
図10 現況シミュレーション結果例(メッシュ間隔は500m)
6. 騒音監視の将来
監視システムの進化・発展は、この間のコンピュータ技術の進歩に大きく依存していますが、 それぞれの時期での問題点に、最新技術のテストフィールドとして取り組めたことにその原動力があると考えています。
新東京国際空港周辺の航空機騒音監視システムは、前述のとおり50カ所以上の常時監視地点のほか、 飛行軌跡のための監視を行うなど、国内外の他の空港と比べて、かなりきめ細かい監視体制が取られていると自負していますが、 今後に計画されている滑走路の増設など空港の拡張に際し、現況の体制を踏まえ、さらにきめ細かい監視システムを検討する必要があります。
そのポイントの第1は、「点」での騒音監視を「面」での騒音監視に変えることにあります。 言い替えれば、広範囲な任意の場所での騒音状況を把握することにあります。
これを実現させるためには、これまで個別に実施してきた以下の手法を、 系統的かつ自動的に行うシステムの開発により可能となると考えます。
- 常時監視地点での騒音把握。
- 飛行高度コースの常時監視。連続した軌跡として把握。
- 1., 2.の実測データを基に現況シミュレーションの実施。
第2のポイントは、測定結果の迅速な公開にあります。空港の維持発展には、地域住民の理解と協力が不可欠であるため、 結果の公表に配慮する必要があります。
結果の公表には、現在も実施している定期印刷物によるものと成田市役所ホールでのコンピュータ検索(ビジュアルインフォメーション) などのほか、最近、普及が著しいインターネットのようなパソコンネットワークを用いるものなどを検討したいと考えています。
謝辞
新東京国際空港公団、千葉県大気保全課、千葉県環境研究所及び周辺自治体の皆様には日常のご協力に、 その他全国の航空機騒音測定を行う多くの自治体の方々には種々のご教示に、また、千葉工業大学の子安勝教授には日頃のご指導に、 さらに、この発表の機会を与えていただいた小林理学研究所の山田一郎所長に、深く感謝いたします。
【参考文献】
- 1) 奥田、岡部他:騒音制御工学会講演論文集(1986年、9月)
- 2) 林、大橋:「騒音制御」(1988年、Vol.12、No.5)
この報告は、今年8月にイギリス、 リバプールで開催された「インターノイズ '96」での発表論文を基に一部加筆したものです。(文責、奥田)