

営業推進部・システム事業部 高島 和博
1. はじめに
球バッフルマイクロホンアレイを用いた音源探査システムNoise Visionは、カメラを一体化した音源可視化システムです。このシステムを用いれば、球の周囲のいずれの方向にある音源も写真上で可視化できます。現在ではリアルタイムでの音源可視化もできるこのシステムは、自動車から鉄道、建築、電気製品等の静粛化に利用されてきました。また、航空機騒音の識別のためのセンサー及びアルゴリズムの開発、騒音コンサルティングのツールとしての活用、コンサートホール、スタジオ等での初期反射音の解析、残響室の拡散性の評価など、その適用範囲を広げてきました。
一方、Noise Visionで用いている音源探査アルゴリズムでは解決が難しい問題もあり、お客様から宿題を頂くこともしばしばです。今回のご紹介は、これまでのNoise Visionでは解決が難しい課題の一つを解決できるかもしれない、そんな技術のご紹介です。
2. 解決が難しい課題とは?

図1 Noise Visionシステム
これまでのNoise Visionで解決が難しい課題とは何でしょうか?写真上で可視化される音源情報を持ってすれば、いかなる場合でも騒音対策の指針となるのでしょうか?いえいえ、どのような測定器にも必ず限界があり、何でもこなせる万能選手は実は非常に少ないことをまずはご理解頂かなくてはなりません。
例えば温度計。室温を測定することを対象にしている温度計は、自動車の排気のような高温で使用することはできません。長さの例では、建築ではポピュラーな巻尺(コンベックススケール)。0.1mm単位の長さを正確に測定することは出来ません。逆に精密な測定が得意なノギスやマイクロメーターは、建築物程度の大きさの測定には対応できません。
音の測定も同様です。最もポピュラーなマイクロホン一つを例にして考えてみましょう。通常私達が測定で使うことが多く、騒音計にも装備されている直径1/2インチの自由音場型マイクロホン。これも音圧レベルの測定範囲や周波数範囲が規定されています。つまり、限界を超える低音圧ではさらに高感度かつ自己ノイズが小さいマイクロホンが必要ですし、20kHzを超える領域ではマイクロホンのサイズを小さくする必要があります。さらに高周波、すなわち本格的な超音波領域ではマイクロホン自体の適用が原理的に難しくなり、別の種類のセンサーが必要になります。いずれにしても、測定器はその性能・限界を把握した上で使って、はじめてその真価を発揮するのです。
では、Noise Visionの場合はどうでしょうか?まず、Noise Visionも音の入力装置としてマイクロホンを使用しますので、前述のとおり、測定できる音圧や周波数範囲はマイクロホンの性能でまず決まっています。これに加えて重要なのが、可視化の際に使用するアルゴリズムです。
Noise Visionはマイクロホンで測定された音圧をそのまま写真上に表示するシステムではありません。測定された音圧をデジタル信号処理の技術で処理し、特定の方向から到来している音の強さを計算し、写真上で可視化するシステムです。実はこの"特定の方向から到来する音の強さ"を計算するアルゴリズムが原因で生じる限界があるのです。そのキーワードが"低周波"と"干渉音場"です。
まずは"低周波"からお話ししましょう。図2はNoise Visionを用いて、スピーカから放射される音を250Hz、2000Hzで解析した例です。最大値の赤~最小値の青までのダイナミックレンジはどちらも同じです。何かお気づきになりませんか?そう、同じスピーカから放射している音にも関わらず、赤い領域の大きさがだいぶ違いますね。これが問題点の一つのキーワード"低周波"と関連する"周波数による分解能の違い"です。Noise Visionで使用しているアルゴリズムはビームフォーミングと呼ばれるものの一種です。(以下、ビームフォーミングをBFと略します。)詳細は省略しますが、BFは低周波域では音源を見たときに"大きな"音源に見えます。逆に高周波域になるに従って分解能が改善し、"小さな"音源に見えるという特性を持っています。この特性は複数の音源が想定される状況で使用した際、複数の音源を分離して表示できるかどうかという"分解能"に関係します。Noise Visionでは、信号処理上の工夫により、一般的ななBFに比べて低周波域での分解能を向上させる工夫を施していますが、現実的には完全な解決は難しく、図2のような差が出てしまうのです。
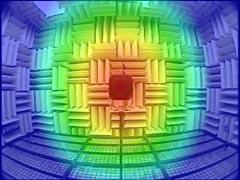
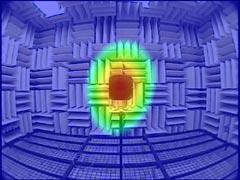
図2 スピーカからの放射音の解析結果(上:250Hz、下:2000Hz)
続いて2番目の干渉音場について考えてみましょう。図3は、室内音響でよく説明に用いられるチャートで、室内に音源がある場合の音源からの音圧レベル距離減衰特性を表しています。
図3 室内での音圧レベル距離減衰特性
このチャートを見ると、音源からの距離が近いほど音源からの直接音の影響が大きくなり、音源から離れるほど拡散音の影響で距離減衰がなくなり、音圧レベルが一定になることがわかります。Noise Visionのような音源の情報を解析する機器では、音源の近傍の直接音の影響が大きい位置、すなわち音圧レベルが赤い点線に沿って減衰する領域で測定することがまず重要です。しかし、このチャートがそのまま当てはまらないケースがあるのです。実はこのチャートは室内の音を統計的に扱う拡散音場という考え方をベースに計算されたものです。このチャートに当てはまらない音圧レベル分布を示す例、それが、キーワード"干渉音場"と関連する"定在波"です。
定在波は読んで字のごとく、その場にとどまって波が進行状態にならない状態を指します。例えば、硬い壁の前にスピーカを置いて、純音(正弦波)を放射した場合、スピーカと壁の間では直接音と壁からの反射音が干渉し、音圧レベルの山(ピーク)/谷(ディップ)が空間的に繰り返される音場ができます。直接音と反射音がほぼ同じ大きさで到来してできる干渉ですから、このピーク/ディップが激しいところに測定器を設置しても、あるいは人間が立ったとしても、音源の方向や位置が非常にわかりにくい状態になります。
図4 剛な壁面の前面にできる定在波
このような音場にNoise Visionを設置して解析すると、真の音源の方向を指し示すことができるでしょうか?これが実際には非常に難しいのです。なぜならば、Noise Visionで解析に使っているBFは、音の伝搬に一種の近似的なモデルを設定しているからです。
BFでは、方向別の音圧レベル(指向性音圧レベル)を推定できますが、この際の音場には、音波が"反射のない自由音場を、ある一つの方向から伝搬している"という近似的なモデルの上で、この音波の振幅を推定します。つまり定在波のように自由音場とは程遠い状態では、BFで推定された音源は定在波のピーク/ディップの影響で現れた偽の音源である可能性が高いのです。このやっかいな定在波は、閉空間であれば空間のサイズ・形状に応じた、特定の周波数で影響が大きくなり、特に低周波域で問題になります。
それでは、低周波域で定在波の影響が大きい状態で利用できる可視化手法はないのでしょうか?これが今回の技術開発の動機であり、狙いでもありました。
3. 新アルゴリズム - 球面近距離音響ホログラフィ
BFは指向性音圧レベルを算出する手法です。計算結果はあくまで"音圧レベル"、すなわちエネルギー次元であり、球の周囲の音圧を位相情報も含めて正確に算出することはできません。この近似的なモデルが原因で、BFでは定在波が発生した場合の解析が困難になっていました。もし、どんな音場にあろうとも、球の周囲の点での音圧や粒子速度が推定できれば、音源(例えば部屋の壁面)に近接した状態で測定を行うことで音響放射の様子を正しく測定することができると考えられます。
音圧や粒子速度を推定できるという意味で、この問題を解決できる可能性がある技術には近距離音響ホログラフィがあります[1][2]。この手法は、平面形状のマイクロホンアレイを使って、平面上の格子点で測定された音圧を使ってマイクロホンアレイから"少しだけ"離れた点での音圧及び粒子速度を推定できることが知られています。"少しだけ"なので"近距離"と呼ばれるのですが、マイクロホンから離れた位置での情報を推定できることは非常に強力で、音源探査の有効な手法の一つになっています。しかし平面形状のマイクロホンアレイでは、マイクロホンアレイに対して前から到来する音と後ろから到来する音を区別できないため、音の干渉を前提とした音場での利用は不可能です。つまり閉空間内での利用は難しいと言わざるを得ません。
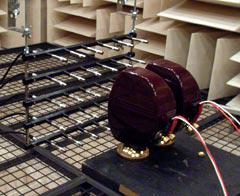
図5 平面アレイでの近距離音響ホログラフィの実験
そこで近年先端的な研究者によって導入されたのが、球面座標系で行う近距離音響ホログラフィでした。最初にこの技術を紹介したのは、アメリカ海軍の研究所に所属するアール・ウィリアムス(E. Williams)博士で、彼は平面アレイに代表される近距離音響ホログラフィの開発者としても広く知られています。2006年のアメリカ音響学会誌に論文が発表され、航空機の室内騒音を解析した事例が紹介されました[3]。この論文は、ハードなバッフルにマイクロホンをフラッシュマウントしたNoise Visionとは異なり、球状にマイクロホンを配置した"オープンアレイ"でした。幸運なことに私は、Noise Visionに関連する技術発表のために訪れた国際会議でウィリアムス博士の発表を目の当たりにすることができ、その後博士と共同でNoise Visionで使用している"剛球アレイ"での技術開発を行う機会を得ることができました[4][5]。このアルゴリズムをここではSp-NAH(Spherical Near-field Acoustical Holographyの略)と呼ぶことにします。
図6 Sp-NAHの概念(水色の領域の音圧、粒子速度が計算可能)
Sp-NAHの定式化は数学的に非常に複雑で、本技術ニュースの趣旨からも外れることから省略いたします。詳しくお知りになりたい方は参考文献をご参照ください[3][4][5]。この手法は閉空間でも開空間でも利用でき、図6のようにマイクロホンアレイの周辺領域(水色の領域)の音圧及び粒子速度が、球の表面で離散的に測定された音圧から計算できます。さらにはそこからこの領域内の音響インテンシティを推定することができます。
ただ、本稿の最初にも書かせていただきましたように、Sp-NAHにも限界があり、それをよく理解した上で利用しなければなりません。まず、BFで対応できていた高周波の音源探査が難しくなります。Noise Visionの標準型センサー(直径260mm)の場合、BFでは上限周波数5000Hz程度まで解析可能ですが、Sp-NAHでは測定条件にもよりますが約1500Hzになります。その代わり、低周波側はBFでは精度の低下でほとんど対応できない50Hz程度から利用できます。つまりSp-NAHがBFのウィークポイントである"低周波"、"干渉音場"の両方を解決できる可能性を持っていることがご理解いただけると思います。
4. 新可視化手法 - ボリューム音響インテンシティ

図7 音響インテンシティプローブの例
音響インテンシティの測定方法をご存知の方は、この技術ニュースをお読みいただいている方の中にも多くいらっしゃるのではないかと思います。音響インテンシティを測定するためには、通常のマイクロホンではなく、"音響インテンシティプローブ"と呼ばれるセンサーを使います。これには色々なタイプがあり、2個のマイクロホンを近接して並べたもの(P-Pタイプ)、マイクロホンと粒子速度センサーをほぼ同一位置に置いたもの(P-Uタイプ)など、様々なタイプが提案されています。ただ、いずれの手法もプローブを置いた位置での音響インテンシティを測定するためのもので、プローブから離れた場所の音響インテンシティは推定できません。
今回開発したSp-NAHは、マイクロホンアレイを使った測定結果から音響インテンシティを推定し、一度の測定で球の周囲の音響インテンシティ分布を一気に計算することができます。つまり、音響インテンシティの分布を測定するのに、複数のプローブを用意したり、プローブの位置を変えて何度も測定したりするといったことは必要なくなります。更に私共は、将来的にSp-NAHはリアルタイム処理も可能な技術と考えており、音響インテンシティ分布のアニメーション表示もできるようになると考えています。
さて、このSp-NAHではどのように音源探査を行うのでしょうか。例えばスピーカのように、振動して音を放射している板があるとお考え下さい。音は板の "機械的な振動エネルギー"が"音響エネルギー"に変換されたものと考えることができます。Sp-NAHで推定できるのは、空間内の音圧と粒子速度です。実は、板の振動速度と板の表面に垂直な方向の粒子速度は同じ値となります。従って板の表面に垂直な方向の粒子速度を非接触で測定できれば、板の振動速度を測定したのと等価です。しかし、実際の現象はまだまだ複雑です。板の振動が大きくても、音にエネルギーが変換されにくいケースが存在します。そこで注目するのが音響インテンシティです。板表面に垂直な方向の音響インテンシティは、板から実効的に放射される音響パワーと考えることができます。つまり、境界面に垂直な粒子速度が大きく、音響インテンシティの湧き出しが認められるような場所を音源と見なせばよいということになります。
図8 ボリューム音響インテンシティの可視化の例
5. Sp-NAHの適用事例
Sp-NAHの特徴を生かした測定の事例を2例ご紹介いたします。
5.1 リスニングルーム音場の解析例
リスニングルームやスタジオのコントロールルームは低周波において、室の形状に依存した定在波の影響で、室内の音圧レベル分布が特定の周波数でピーク・ディップを伴う現象が問題になります。私共の音響設計では、この問題を事前に予測・回避するために、計画段階の部屋の形状からシミュレーションし、形状の改善からご提案させていただくこともしばしばです。また、低周波域のため吸音材等でうまく音場をコントロールすることが難く、一旦出来上がってしまったものに少々手を入れても改善が難しいのがこの問題です。
そこで、図9に示すようなサラウンド対応リスニングルームで、リスニングポジション周辺の音響インテンシティ可視化を行ったものが図10です。ここではデモンストレーションのため、Lチャンネル、Rチャンネルから同相のモノラル信号を再生した場合と、逆相の信号を再生した場合の結果を比較してみました。同位相の場合は、L、Rから再生される音のファンタムイメージで、音響インテンシティが正面からリスニングポジションに向かっているのに対し、逆相の音場では、リスニングポジションを避けるように音響インテンシティが流れていることがわかります。これはリスニングポジションが、L、Rからの音波が干渉した結果、音圧のディップになるためです。これと似たような現象になる定在波の場合でも同様の結果が得られることが想像できます。
図9 解析対象のリスニングルーム

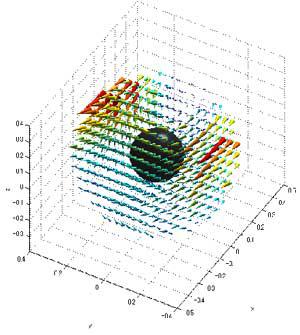
図10 リスニングポジション周囲のボリューム音響インテンシティ解析結果
(上:L、R同相駆動、下:L、R逆相駆動)
次にNoise Visionセンサーを移動させて音圧レベルの分布を測定してみました。通常、音圧レベルの分布はマイクロホンで測定された音圧レベルをそのまま使いますが、今回はSp-NAHで推定した音圧を使うことで、測定点数の大幅な低減を試みました。Lチャンネル、Rチャンネル、それにL、Rチャンネルから同時に音を再生した場合の音圧レベル分布の測定結果を示したものが図11で、図中の●はNoise Visionセンサーを置いた測定点を示しています。この周波数では定在波の影響を少なからず受けており、特にL、Rを同時に再生したときの音圧分布が室中央にピークがある特異な状態になっていることがわかります。
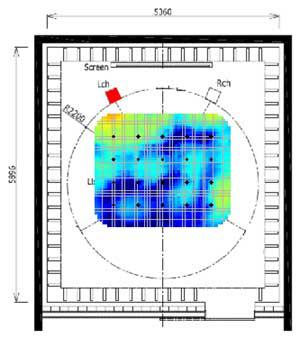
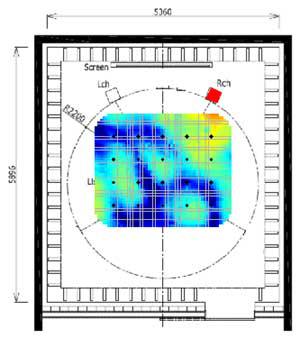
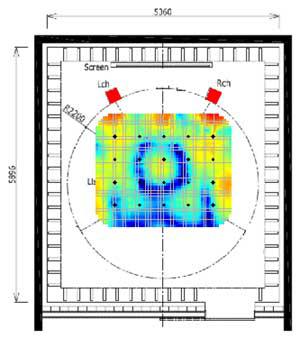
図11 音圧分布の解析結果(250Hz) (上:L、中:R、下:L+R)
5.2 自動車の車室内騒音の解析例
自動車の車室内でも低周波の解析は非常に難しい問題の一つでした。車室内の形状は非常に複雑で、様々な計器、収納スペース、シート、カーペットなど多くの部品で内装が構成されています。また、音源もエンジン、タイヤと路面との接触等さまざまであり、しかも振動が伝わって音になる"固体伝搬音"と、一旦音になったものが遮音構造を透過して車室内に伝搬する"空気伝搬音"の2種類を常に頭に入れておかなければ対策ができません。これに加えて、低周波での定在波の影響は避けられず、部位ごとの騒音寄与の解析が困難になります。
そこで加速時のエンジン騒音を対象としてSp-NAHで解析を行いました。テスト車両をシャシダイナモのローラー上でエンジン回転数を3000rpmで加速走行させ、Noise Visionセンサーを助手席に乗せて測定を行いました。図13は、測定時のマイクロホンでの周波数特性を表しており、エンジンの回転数に対応した成分が周波数特性上で鋭いピークを持っていることがわかります。Sp-NAHの計算結果は、車両のイメージの上に重ね描いて表示しました。この結果を図14に示します。
105Hzの結果は、エンジンが前方にあるにも関わらず、車両後方からの音響インテンシティフローが見られます。最も興味深いのは305Hzの結果で、車両内の定在波の影響から音響インテンシティのフローに顕著な渦が見られます。このような音場では、もともと自由音場を想定しているBFでは有益な可視化結果が得られないことは容易に想像できます。また、今回はNoise Visionセンサーを助手席にセットしましたが,リスニングルームと同様、センサーを車室内で移動させながら何点か測定することにより、室内の音圧分布の全体像も短時間で把握することができるのではないかと考えています。

図12 Noise Visoinセンサーの設置
図13 エンジンノイズの解析例
(上:エンジン近傍の振動ピックアップと車室内騒音のコヒーレンスの周波数特性、
下:車室内の音圧レベルの周波数特性)
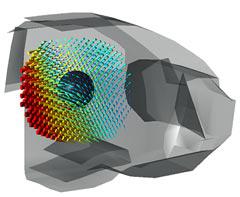
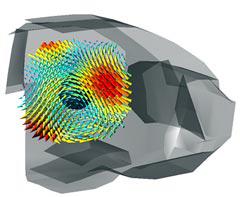
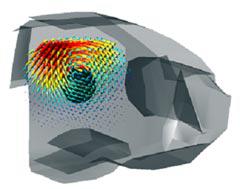
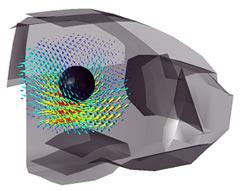
図14 運転者周囲のボリューム音響インテンシティ解析結果
(上から105Hz、305Hz、398Hz、504Hz)
6. おわりに
今回はこれまでのNoise Visionでは解析が難しかった課題を解決すべく、球面近距離音響ホログラフィを適用した事例をご紹介いたしました。この技術を用いれば、低周波での音場解析をこれまで以上に的確に、かつ迅速に行うことができるようになると考えています。この手法は閉空間内の音場・音源可視化に有効であり、小空間の建築における音響改善から自動車等の騒音対策にまで幅広くご利用いただけると考えられます。現段階ではプロトタイプですがこれからは製品化を進め、皆様にもこの技術を簡単にお使いいただけるようなアプリケーションソフトウェアとする所存です。
また、この技術以外にもお客様に新しい価値をご提供できるよう、研究開発を鋭意進めております。こちらも公開できる段階になり次第、学会や技術ニュースで紹介することができると思いますし、セミナー等での情報発信も継続的に行っております。何か"音"でお困りのことがあれば、どうぞお気軽にご連絡ください。
参考文献
- E. G. Williams and J. D. Maynard, “Holographic Imaging without the wavelength resolution limit”, Phys. Rev. Lett., 45, 554-557, 1980.
- Earl G. Williams, “Fourier Acoustics: Sound Radiation and Nearfield Acoustical Holography”, Academic Press, London, UK, 1999.
- Earl G. Williams, Nicolas Valdivia, Peter C. Herdic and Jacob Klos, “Volumetric acoustic vector intensity imager”, Journal Acoustical Society of America, vol. 120, No. 4, pp. 1887-1897, 2006.
- Earl. G. Williams and Kazuhiro Takashima, “Vector intensity reconstructions in a volume surrounding a rigid spherical measurement array”, ASA-EAA Joint Conference (Acoustics’08 Paris), June 2008.
- Kazuhiro Takashima, Hiroshi Nakagawa and Earl G. Williams, “Vector intensity measurement with a rigid spherical microphone array in a vehicle cabin”, ASA-EAA Joint Conference (Acoustics’08 Paris) Paris, June 2008.