

技術部 大橋 心耳、忠平 好生、田中 菜津
1. はじめに
最近では地域の環境騒音の実態を把握することを目的とした長期間の実態調査への要望が増えてきています。
環境騒音の実態調査は、データの信頼性の面からは係員が現場に常駐して測定を行う方法が最も好ましいのですが、 その手間や経費的な面を考えると自動測定器に頼らざるを得ないのが現実です。
ただ、環境騒音を対象とした一般的な自動測定器は、予め時間や動作レベルなどのデータの取り込み条件を設定しさえすれば、 その条件を満たす場合すべて騒音データとして収集・保存するため、評価対象外のデータを含むこともあります。
話を航空機騒音に絞って進めていくことにしましょう。
航空機騒音の評価は、WECPNLの年間値を用いています。
係員が現場に常駐して測定する場合は、それぞれの季節を代表する(空港によって季節ごとに風向きなどに起因し運航形態が異なる為)時期の測定を行い、 それらの値を基にWECPNL値の年間値を推測する方法が一般的です。
図-1 係員が常駐する航空機騒音測定の例
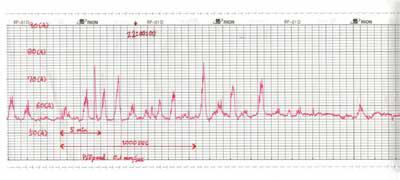
図-2 航空機騒音レベルの時間変動例
また、自動測定装置の普及に伴い年間常時測定を行いWECPNLの年間平均値を求める方法も一般的となってきています。
これらの自動測定器を用いて実際に現場で航空機騒音測定を行う場合には、「現場において目的としたデータを取りこぼさない。」 そのため、「取りこぼさない為に動作条件にかなり余裕を持たせておく。」ことが必要になります。その結果、 取り込み条件に余裕を持たせておくと不必要なデータ(混入騒音データ)が増え、不必要なデータが増えることは、 結局のところ後処理で人間が何らかの判断をして対象騒音を特定し混入データを削除する作業が必要で、混入データを特定する為の根拠(資料やデータ)も必要となり、 自動測定器により得られたデータの信頼性は係員が常駐する方式に比較してかなり低くなるのは避けられなく、データ処理の手間も莫大なものとなります。
最近では空港設置に際し、住居地域への騒音を配慮し海上空港とされる場合が多く、関西国際空港や中部国際空港などでは、 陸地に航空機の騒音が影響を及ぼさないことが大前提とされています。
それに従って航空機騒音の測定は「どのくらいうるさいのか?」を現状把握し必要な対策を施すという目的から、 海上空港に離発着する航空機の騒音が「陸地に対し影響を及ぼさない」ことを立証する目的へと大きく変わってきています。
そのため、騒音測定装置も、陸地に対して影響が無い(つまり陸地の暗騒音を下まわる)ことを測定すること、 さらに年間を通じた常時測定でそれを実現することが求められて来ています。

図-3 騒音計と電波方式による航空機接近識別装置を組み合わせた常時測定局の例
弊社では、1983年以来、航空機騒音自動測定装置の開発・納入を続けそれらのシステムは現在日本の主な空港周辺の約180ヶ所で常時稼動するほどとなりました。
弊社の航空機騒音自動測定局には、騒音自動測定装置のウィークポイントを少しでもカバーする為に、弊社のNOE技術ニュース 第14号、17号、19号などに紹介されている航空機接近識別装置を開発し組み合わせたものや更に実際の騒音波形信号を同時に収録し必要に応じて後で確認することが出来るシステムを採用して頂き得られるデータの信頼度の向上を目指しています。
今回、係員が常駐し測定する場合に得られるデータの精度と遜色のない精度を得ることを目的として、 球バッフルマイクロホンシステム(SBM)を利用した航空機騒音自動測定システムを開発しましたのでここに簡単ですが紹介したいと思います。
2. SBMを利用した航空機騒音自動測定システムの工夫
球バッフルマイクロホンシステム(SBM)は、「全方位音源探査システム Noise Vision」の音源探査機能を航空機騒音測定に利用しようとするもので、 まずは、実際の測定現場での実用実験を行いました。

図-4 SBM稼動テスト風景の図
図-4にSBM稼動テスト風景写真を用いてシステム全体の概要を説明しておきます。
真中の測定局舎の屋根上に設置されている黒い球状のものが「全方向型音源探査装置」、 右側の白い四角い物体が「上空を監視する全天候型CCDカメラ」、右側のコンクリート柱上には、騒音測定用のマイクロホン、 局舎の左側の小柱には、航空機の発するトランスポンダ信号や電波高度計信号電波を受信して「航空機の接近」を精度良く識別する装置などを組み合わせています。

図-5 識別装置とCCDカメラを連携させ上空を通過する航空機を識別
SBMを利用した航空機騒音測定の動作手順を簡単に紹介しておきましょう。
通常の騒音レベルの測定を行うための騒音計と、音の全到来方向・強度解析装置を組み合わせて、以下の動作を実行・継続しています。 なお、動作手順は、「航空機騒音が卓越する場合(主な騒音源が航空機による)」と「主な騒音源が複数存在し、航空機騒音が必ずしも卓越しない場合」の2つのケースを考えます。
(1) 航空機騒音が卓越している場合
- 騒音計の各瞬間毎の騒音レベル値とその時の音の全到来方向及びその強度分布に着目します。
- その瞬間の音の到来方向の強度分布がある一定の方向のみが卓越していれば、その騒音レベルは、その到来方向にある音源からのものと考えられます。
- 観測される騒音レベルとその到来方向の音源強度が相対的に変化していれば、更に明確に騒音源が特定されます。
- 騒音源が移動する場合は、それに伴い音の到来方向の分布が時間の経過と共に移動し、その強度も騒音レベルと相対的に変動することになります。
- 1~4により、測定装置の設置状況と現場における音源の位置関係(たとえば、上空であれば、航空機か鳥・・、地上であれば、自動車か鉄道か人か、地面方向から到達する音は、たとえば地面からの反射音・・・)など、到来音の方向を知ることは、音源を特定するときの有益な情報となります。
- なお、卓越した騒音レベルの特定の後、卓越音よりかなりレベルの低い音源からの到来音についても、卓越音の騒音レベルを基準として到来方向の強度分布情報により到来している寄与度の低い音源からの騒音レベルを推計することも可能となります。
(2) 音源が複数(航空機騒音が卓越していない)の場合
- [方法-1]の1~4に従い各周波数帯毎に詳細検討を行います。
- 通常の現場において騒音源は
- 固定された場所から定常的な騒音を発生している場合
- 固定された場所から変動した騒音を発生している場合
- 移動しながら定常的な騒音を発生している場合
- 移動しながら変動する騒音を発生している場合
- 1の過程により、周辺に散在する音源の時間経過による動きに関する情報を周波数毎に整理し、 それらの強度と騒音レベル周波数特性への影響度を卓越した音源から順番に把握していきます。
- 着目したある瞬間のある音源からの騒音方向強度周波数特性が、他のものよりも卓越(通常10dB以上)していれば、 騒音測定点における騒音周波数特性はその音源が支配していると考えられ、その時の騒音方向強度周波数特性と騒音測定点における騒音周波数特性の関係を把握すれば、 以後その方向からの到来騒音の方向強度周波数特性より騒音レベル測定点における周波数特性が推計できることになります。 これより、卓越した音源からの到達音に埋もれた複数の音源からの到達音の存在(異なる方向からのものである必要がある)も、 次々と特定しそのレベルを推定していくことも可能となります。
- 通常の騒音計では無指向性マイクロホンにより収得した卓越到達音レベル値を指示しますので、到来方向ごとの解析を併用することで、 卓越音源からの音が影響の無い瞬間を検知することにより次なる音源からの到達音レベルを実測することが可能となります。
- なお、騒音測定では、無指向性マイクロホンによる測定値が必要なので、騒音周波数方向特性強度より推計した騒音レベルが他の方向からのものより卓越している場合は、 その瞬間に実測された騒音レベルはその方向からのものと正確に判定できることになります。

図-6 SBMの実用化実験風景(かぶり音の分離)
図-7 SBM出力例
図-7にSBMからの出力情報を示します。
3つのグラフ(上段、中段、下段)の各横軸は全て時間軸(単位:秒)で同期しています。
また、上段のグラフの縦軸は水平角(-180度~+180度の360度の範囲、空港方向をほぼ0度に設定)、 中段のグラフの縦軸は見上げ角(-90度~+90度、0度が地面のレベル)、下段のグラフの縦軸は、騒音レベル時間変動(単位 dB(A)の音源探査装置内部で扱っている相対値)を表しています。
赤色で示された点は、上段のグラフより水平方向にすばやく移動することが判り、かつ見上げ角方向はいずれも0度付近(地面)ですので、 これは周辺の状況より車の通過音(受音点と道路との位置関係が予め判っていれば車の通過速度も把握可能となります。)ということになります。
最初35秒あたりから2台の車が連なって45秒あたりまでに通過し、70秒~90秒あたりに今度は反対方向から通過していったことが把握できます。
次に、空色部分の波形が航空機を表していて水平角-10度(空港方向)~+80度に至るまでゆっくりと連続して移動していることが判ります。
空色の部分は水平角の移動と共に見上げ角も、順次上昇傾向で車の移動とは明らかに異なり、これは離陸中の航空機騒音であることが識別できます。
この時の下段のレベル時間変動グラフにおいて赤が卓越している部分は航空機騒音測定上は、周辺を通過する車からのいわゆる"かぶり音"という扱いをすることになりますが、 もしもこの時間における騒音計の指示値を採用してしまうとWECPNL値が正確に測定できないことになります。
一般的な自動測定装置(騒音計とデータロガーの組み合わせ方式)では、上記の例の場合は、 時間軸で言うと80秒あたりの自動車の通過音を航空機騒音として収得してしまうことになるでしょう。
このように騒音計の出力と音源探査装置を組み合わせて騒音の測定を行うことの大きなメリットがありますが、 ここではこの技術のキ-ポイントとなる音源探査装置について解説したいと思います。
弊社で開発した音源探査装置"Noise Vision"は、球体の表面に埋め込んだ31個のマイクロホンで収音した信号を、 球体の表面回折情報を含めた指向性形成信号処理により360度全方向を対象とし音源到来方向を求めることができ、 同時に球体に組み込んだ12個のCCDカメラの映像と重ねあわせて結果を表示する機能を持ち合わせています。
この音源探査システムは、2004年度の音響学会技術開発賞を受賞しました。
すでにNOE技術ニュース第19号、20号に紹介させていただいています。
今回、SBMで使用している音源探査装置は、マイクロホンの数は16個、主に固定された測定局に取り付け画像情報が一定の場合はCCDカメラも省略可能ですが、 原理的には"Noise Vision"と同等の技術を用いています。

図-8 Noise Vision を用いた騒音測定
3. まとめ
以上簡単ですがSBMを利用した航空機騒音自動測定の紹介を行ってきました。
基本に戻って考えますと、係員が常駐し行う測定は、人間の目でまずレベルレコーダの記録する時間変動を確認しながら、 同時に聴覚によりその時に卓越して到達して来ている音(航空機騒音やかぶり音)の方向や音色、 視覚による機体確認などを行い航空機騒音を特定していると考えられます。
弊社で新規開発したSBMは、この係員が常駐した時の航空機騒音の識別・測定方法・手順を視覚・聴覚に別けて各部分を意識した機械化・自動化を試みたものです。
このSBMを利用した航空機騒音自動測定システムは、海上空港を対象とした騒音監視システムなど、 航空機騒音のレベルが暗騒音レベルと比べても大きくないような場所での測定には特に有効と考えられ、さらに、現在の環境基準では、 航空機騒音の評価をWECPNLで行っていますが、海外では等価騒音レベル(LAeq)を基本としたものが一般的ですが、 その測定を厳密に行う場合航空機騒音以外のものを排除しなければならず、その自動測定においても有効と考えます。
SBMの技術は、音響、電波及び画像による数々の識別技術の集積ということが出来ると思います。 逆に考えると人間の持っている能力は、単純に航空機騒音測定といった切り口から考えてもはるか機械にはなかなか真似の出来ない素晴らしいものと言えるでしょう。
今後も弊社では、自動測定器が唯一人間より勝る「一度動き出せばどのような単純作業でも複雑な作業でも、 手順に従い黙々と継続して働きつづける・・」メリットを生かす為に"素晴らしい人間の能力"に少しでも近づける機能を持った自動測定装置を開発していきたいと考えています。